An excellent Q & A from the Seattle Robotics Society mailing list (updated)
Jeff Birt wrote me a great email on the Seattle Robotics Society mailing list and I thought I would share his questions and my answers to the blog community as a whole:
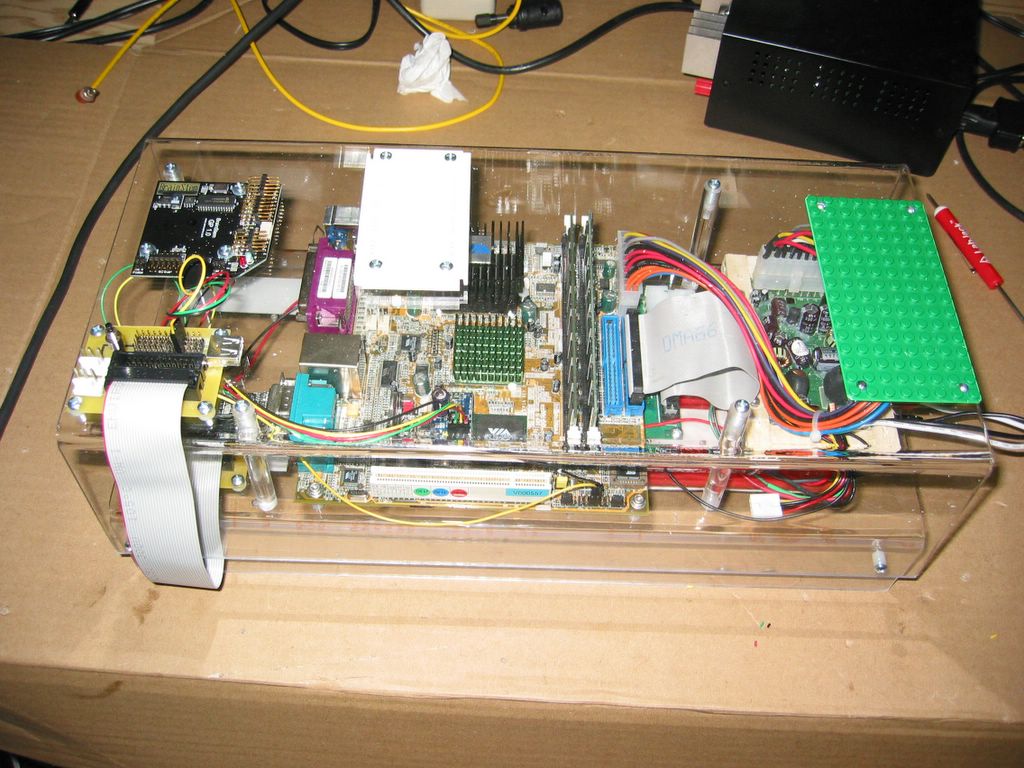
Are you pleased with your choice of EPIA mb?
I'm pleased with my Via EPIA 5000. While it is "only" 500 MHz, that's more than enough CPU for my needs. The only reason I would change would be to move to the smaller 10 cm x 10 cm Nano-ITX form-factor when it comes out. Even then, I'm going to have to evaluate it first because the Nano-ITX promises to be more expensive and more power hungry than the Via EPIA 5000.
Does the fan-less 500 MHz board perform well analyzing two video feeds, etc.
I haven't attempted to analyze two video feeds off of it. Light video analysis (1 fps, orange cone color and shape detection) is working well and that is all I needed to accomplish for Robo-Magellan so that is all I tried. It should have enough CPU to exceed this level of processing by a significant margin, but video processing can get expensive very quickly so you could easily overwhelm the CPU depending upon how complex your algorithm is and how efficient your code is.
What things are you including in your XPe build? What components do you consider essential?
I've just recreated my image to take advantage of the new XPe SP2 bits. I've carefully cataloged the choices I've made and I intend to write it up thoroughly on my blog. I haven't had a chance to write the article yet though and I have a lot of other stuff going on in my life at just this moment so I won't get it written until next week. If you're in a hurry, drop me an email directly and I'll sent you my rough notes.
Any gotchas?
There are unfortunately plenty of gotchas when going through the learning process of how to set up your environment and how to get features such as the Enhanced Write Filter (EWF) working and getting XPe to boot off a Compact Flash card. Again, I'm planning on writing this up in an blog article next week. Unfortunately, I don't have clear rough notes on this yet so you'll just have to wait
I was planning on putting TAP on a BartPe cd. How are you handling this?
I have a hard drive that I attach to my motherboard that I use to download the XPe image and run FBA (First Boot Agent) off of. This hard drive has two partitions, C: contains my XPe image and D: contains a full XP Pro image. I boot to the D: XP Pro image to run TAP.
Lee asks, "What about i2c or SPI? Does this board have those?"
I use an Acroname Brainstem for my IO (it attaches via RS-232 to the motherboard). The Brainstem has two headers for I2C.
Fred Kerr asks, "How are you powering the board?"
I use two Sub-C RC card battery packs (6 cells each) wired together to make 12 cells total, a PW-80 DC to DC power converter (90+% efficient) from ITuner, and an Electrifly Triton charger.
Are you pleased with your choice of EPIA mb?
I'm pleased with my Via EPIA 5000. While it is "only" 500 MHz, that's more than enough CPU for my needs. The only reason I would change would be to move to the smaller 10 cm x 10 cm Nano-ITX form-factor when it comes out. Even then, I'm going to have to evaluate it first because the Nano-ITX promises to be more expensive and more power hungry than the Via EPIA 5000.
Does the fan-less 500 MHz board perform well analyzing two video feeds, etc.
I haven't attempted to analyze two video feeds off of it. Light video analysis (1 fps, orange cone color and shape detection) is working well and that is all I needed to accomplish for Robo-Magellan so that is all I tried. It should have enough CPU to exceed this level of processing by a significant margin, but video processing can get expensive very quickly so you could easily overwhelm the CPU depending upon how complex your algorithm is and how efficient your code is.
What things are you including in your XPe build? What components do you consider essential?
I've just recreated my image to take advantage of the new XPe SP2 bits. I've carefully cataloged the choices I've made and I intend to write it up thoroughly on my blog. I haven't had a chance to write the article yet though and I have a lot of other stuff going on in my life at just this moment so I won't get it written until next week. If you're in a hurry, drop me an email directly and I'll sent you my rough notes.
Any gotchas?
There are unfortunately plenty of gotchas when going through the learning process of how to set up your environment and how to get features such as the Enhanced Write Filter (EWF) working and getting XPe to boot off a Compact Flash card. Again, I'm planning on writing this up in an blog article next week. Unfortunately, I don't have clear rough notes on this yet so you'll just have to wait
I was planning on putting TAP on a BartPe cd. How are you handling this?
I have a hard drive that I attach to my motherboard that I use to download the XPe image and run FBA (First Boot Agent) off of. This hard drive has two partitions, C: contains my XPe image and D: contains a full XP Pro image. I boot to the D: XP Pro image to run TAP.
Lee asks, "What about i2c or SPI? Does this board have those?"
I use an Acroname Brainstem for my IO (it attaches via RS-232 to the motherboard). The Brainstem has two headers for I2C.
Fred Kerr asks, "How are you powering the board?"
I use two Sub-C RC card battery packs (6 cells each) wired together to make 12 cells total, a PW-80 DC to DC power converter (90+% efficient) from ITuner, and an Electrifly Triton charger.
posted by Jay Beavers at 1:24 AM
![]()
![]()